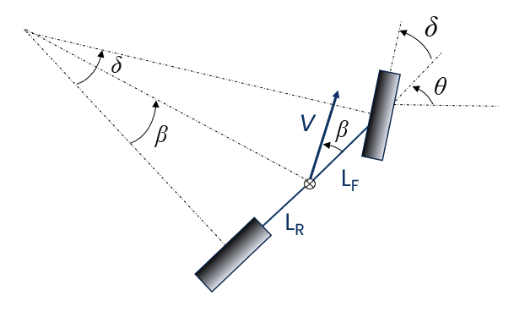
Simple Kinematic
Most simple one. Used for planning in the literature. See Motion Planning and Control Pipeline for a Formula Student Autonomous Vehicle, page 23
This model is well known in the literature (e.g. [14]) to perform well at low speed profiles (less than 5 m/s) Motion Planning and Control Pipeline for a Formula Student Autonomous Vehicle, page 23
Here we use instead of .
State space
and the state derivative is
where
and the control inputs are
AMZ
Kinematic
This is model to be used in blending.
and
Dynamic
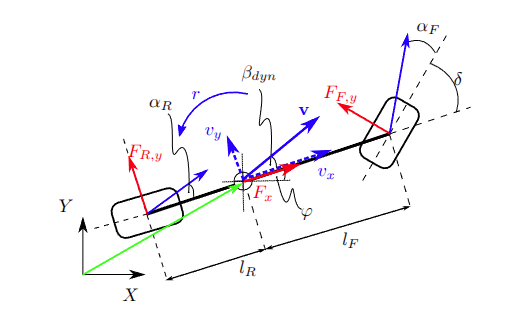
The used vehicle model is derived under the following assumptions,
- the vehicle drives on a flat surface
- load transfer can be neglected
- combined slip can be neglected
- the longitudinal drive-train forces act on the center of gravity. AMZ Driverless, The Full Autonomous Racing System, page 26
and
where we find lateral tire force by using simplified Pajecka tire model:
and
Where . Here stands for motor force where is motor model and is the pedal position. These parameters are identified from the experiments.
Hybrid-Bicycle Model
This model blends the kinematic model and dynamic model based on the vehicle longitudinal speed.
Here observe that both models use the same state vector. Therefore we blend these model dynamics by
where when model is blended between m/s.
Discretization
We use 4th order Runge-Kutta method to discretize the the system.
Numerically Stable Dynamic Bicycle
and we discretize that model using something similar to Backwards Euler method. See Numerically Stable Dynamic Bicycle Model for Discrete-time Control, page 2